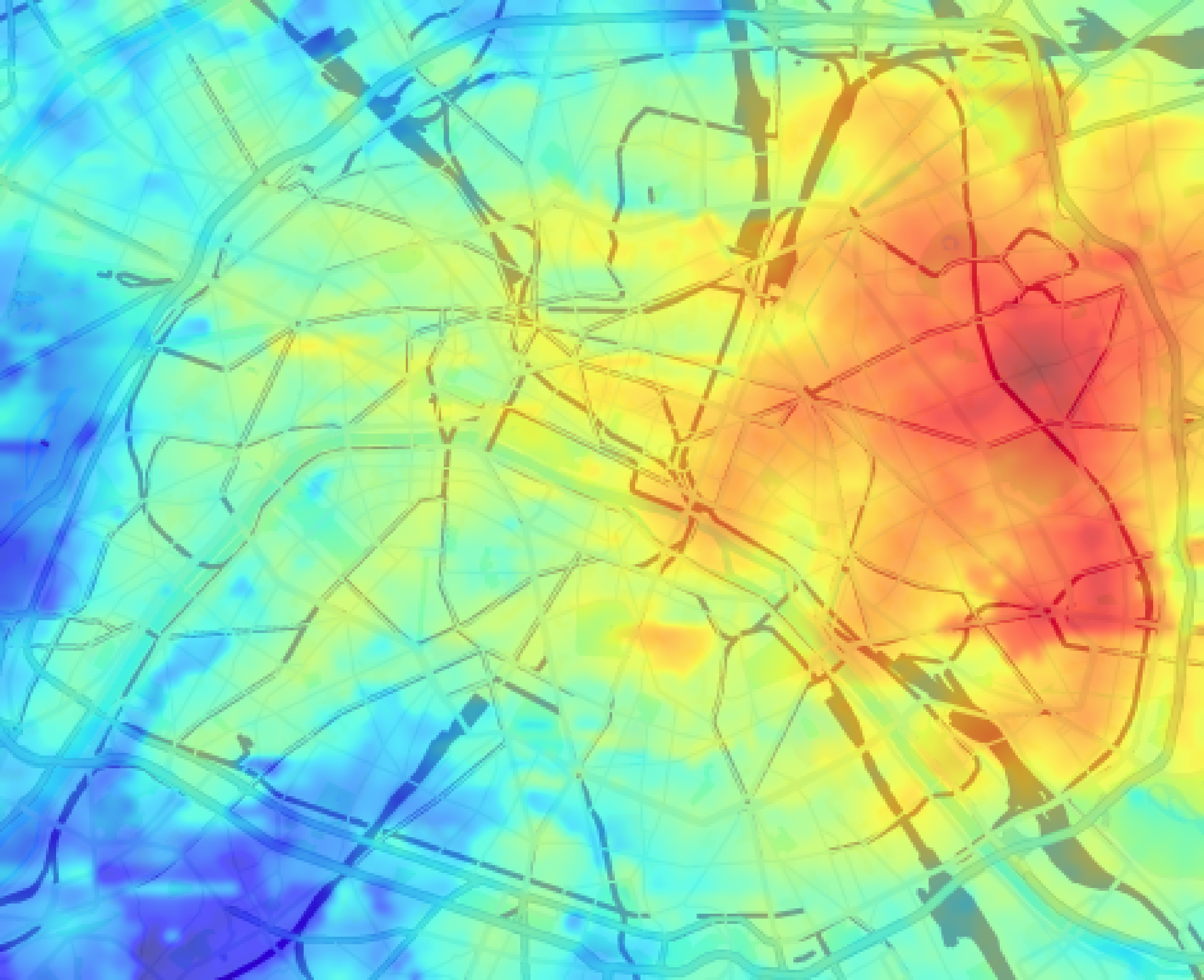
Commute Heat Map
Generates heat maps of commute times across a geographic grid using Google Maps APIs.
Python
matplotlib
numpy
Google Maps API
View source
// hello, fellow travelers
A glimpse into the workspace of a tinkerer.
GitHub
Generates heat maps of commute times across a geographic grid using Google Maps APIs.
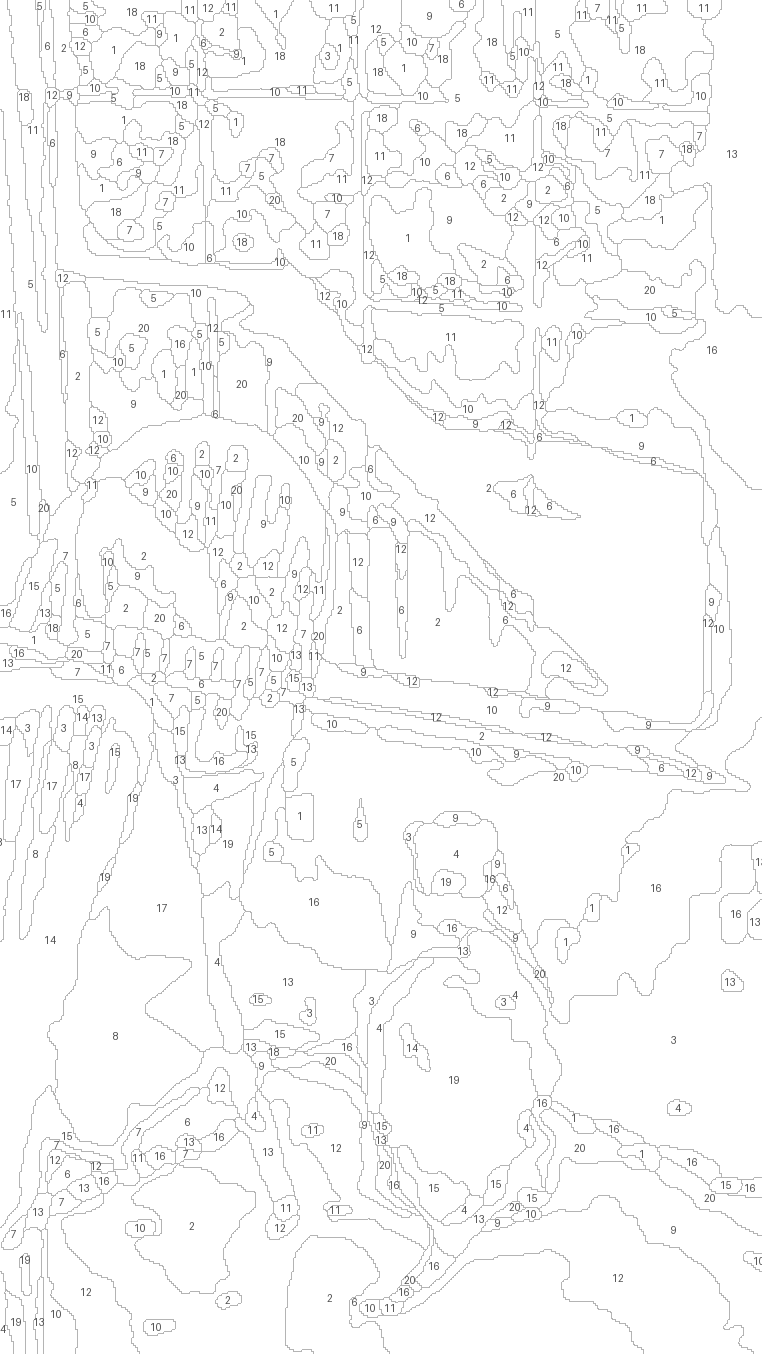
Converts color images into paint-by-numbers templates using k-means clustering in CIELAB color space.
Builds a playlist of upcoming concerts from artists performing in your area.
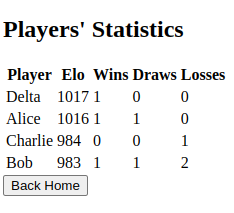
Web app for recording chess games and tracking persistent ELO ratings with a live stats dashboard.
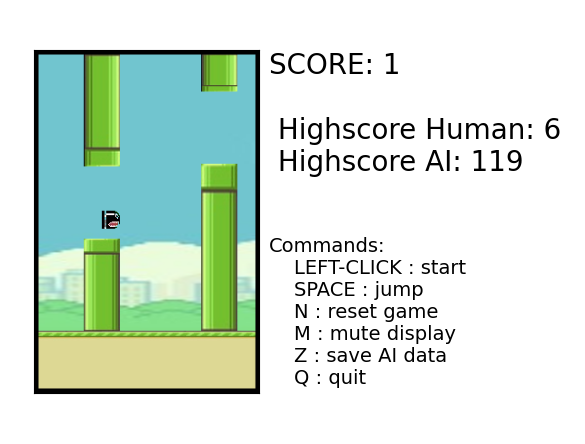
Reinforcement learning agent that masters Flappy Bird through value iteration and ε-greedy exploration.

Reinforcement learning agent that plays the Chrome offline Dino Run game via Selenium automation.
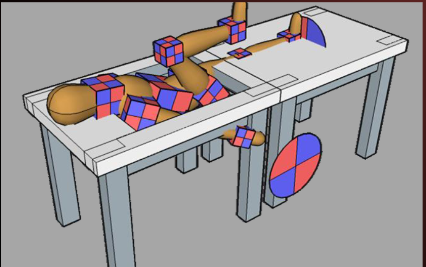
Robotic "sawing a woman in half" illusion — Arduino-controlled servo legs driven by motion-captured foot angles.
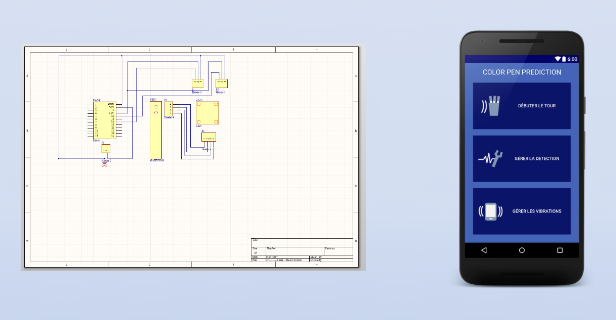
Electronic magic trick — an Arduino with a force sensor guesses a hidden pen color, revealed via an Android app over Bluetooth.

Simulation of an aerial transportation network using autonomously controlled VTOL drones.
Converts photos into pencil-style drawings using edge detection, region segmentation, and Line Integral Convolution.
CLI wrapper for youtube-dl to download playlists as MP3 or MP4 with minimal configuration.
Stanford CS229 final project.
Predicts solar farm power output from weather measurements using regression, gradient boosting, and neural networks.
Stanford CS231n final project.
Classifies bouldering difficulty grades on the MoonBoard.
Stanford CS230 final project.
Colorizes black-and-white videos with a GAN pipeline.
Stanford CS224N final project.
Extractive QA on SQuAD 2.0 using BiDAF enhanced with multi-level embeddings and a custom distance-aware loss.
My personal solutions to Advent of Code puzzles across multiple years.
Stanford CS231n assignments.
CNNs, RNNs, attention, and style transfer in PyTorch.

Stanford AA273 assignment.
Extended Kalman Filter for simultaneous localization and mapping on a non-holonomic robot with unknown measurement noise.
Stanford AA228 final project.
POMDP formulation for Roomba localization using particle filtering and bump sensor observations.
Stanford AA222 final project.
Single- and multi-objective genetic algorithms for 2D offline path planning with Pareto-optimal front.
CentraleSupélec OOP course project.
Object-oriented food ordering and delivery platform with client, restaurant, and manager stakeholders.